

An electronic skin that can learn from feeling ‘pain’ could help create a new generation of smart robots with human-like sensitivity.
A team of engineers from the University of Glasgow developed the artificial skin with a new type of processing system based on ‘synaptic transistors, which mimic the brain’s neural pathways in order to learn. A robot hand that uses smart skin shows a remarkable ability to learn to react to external stimuli.
In a new paper published today in the journal Science Robotics, the researchers describe how they built their prototype computational electronic skin (e-skin), and how it improves on the current state of the art in touch-sensitive robotics.

Scientists have been working for decades to build artificial skin with touch sensitivity. One widely-explored method is spreading an array of contact or pressure sensors across the electronic skin’s surface to allow it to detect when it comes into contact with an object.
Data from the sensors is then sent to a computer to be processed and interpreted. The sensors typically produce a large volume of data which can take time to be properly processed and responded to, introducing delays that could reduce the skin’s potential effectiveness in real-world tasks.
The Glasgow team’s new form of electronic skin draws inspiration from how the human peripheral nervous system interprets signals from the skin in order to eliminate latency and power consumption.
As soon as human skin receives an input, the peripheral nervous system begins processing it at the point of contact, reducing it to only the vital information before it is sent to the brain. That reduction of sensory data allows efficient use of communication channels needed to send the data to the brain, which then responds almost immediately for the body to react appropriately.
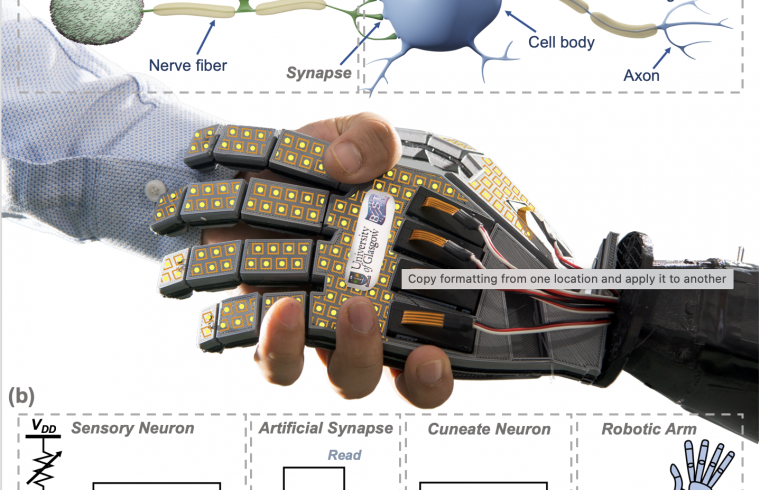
To build an electronic skin capable of a computationally efficient, synapse-like response, the researchers printed a grid of 168 synaptic transistors made from zinc-oxide nanowires directly onto the surface of a flexible plastic surface. Then, they connected the synaptic transistor with the skin sensor present over the palm of a fully-articulated, human-shaped robot hand.
When the sensor is touched, it registers a change in its electrical resistance – a small change corresponds to a light touch, and harder touch creates a larger change in resistance. This input is designed to mimic the way sensory neurons work in the human body.
In earlier generations of electronic skin, that input data would be sent to a computer to be processed. Instead, a circuit built into the skin acts as an artificial synapse, reducing the input down into a simple spike of voltage whose frequency varies according to the level of pressure applied to the skin, speeding up the process of reaction.
The team used the varying output of that voltage spike to teach the skin appropriate responses to simulated pain, which would trigger the robot hand to react. By setting a threshold of input voltage to cause a reaction, the team could make the robot hand recoil from a sharp jab in the centre of its palm.
In other words, it learned to move away from a source of simulated discomfort through a process of onboard information processing that mimics how the human nervous system works.
The development of the electronic skin is the latest breakthrough in flexible, stretchable printed surfaces from the University of Glasgow’s Bendable Electronics and Sensing Technologies (BEST) Group, led by Professor Ravinder Dahiya.
Professor Dahiya, of the University’s James Watt School of Engineering, said: “We all learn early on in our lives to respond appropriately to unexpected stimuli like pain in order to prevent us from hurting ourselves again. Of course, the development of this new form of electronic skin didn’t really involve inflicting pain as we know it – it’s simply a shorthand way to explain the process of learning from external stimuli.
“What we’ve been able to create through this process is an electronic skin capable of distributed learning at the hardware level, which doesn’t need to send messages back and forth to a central processor before taking action. Instead, it greatly accelerates the process of responding to touch by cutting down the amount of computation required.
“We believe that this is a real step forward in our work towards creating large-scale neuromorphic printed electronic skin capable of responding appropriately to stimuli.”
Fengyuan Liu, a member of the BEST group and a co-author of the paper, added: “In the future, this research could be the basis for a more advanced electronic skin which enables robots capable of exploring and interacting with the world in new ways, or building prosthetic limbs which are capable of near-human levels of touch sensitivity.”
The team’s paper, titled ‘Printed Synaptic Transistors based Electronic Skin for Robots to Feel and Learn’, is published in Science Robotics. The research was supported by funding from the Engineering and Physical Sciences Research Council (EPSRC).






