

Test Rover at JPL During Preparation for Mars Rover’s Low-Angle Selfie
 2")
This view of a test rover at NASA’s Jet Propulsion Laboratory, Pasadena, California, results from advance testing of arm positions and camera pointings for taking a low-angle self-portrait of NASA’s Curiosity Mars rover.
This rehearsal in California led to a dramatic Aug. 5, 2015, selfie of Curiosity at online. Curiosity’s arm-mounted Mars Hand Lens Imager (MAHLI) camera took 92 of component images that were assembled into that mosaic. The rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity.
[pullquote]This practice version was taken at JPL’s Mars Yard in July 2013, using the Vehicle System Test Bed (VSTB) rover, which has a test copy of MAHLI on its robotic arm. [/pullquote]
MAHLI was built by Malin Space Science Systems, San Diego. JPL, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project’s Curiosity rover.
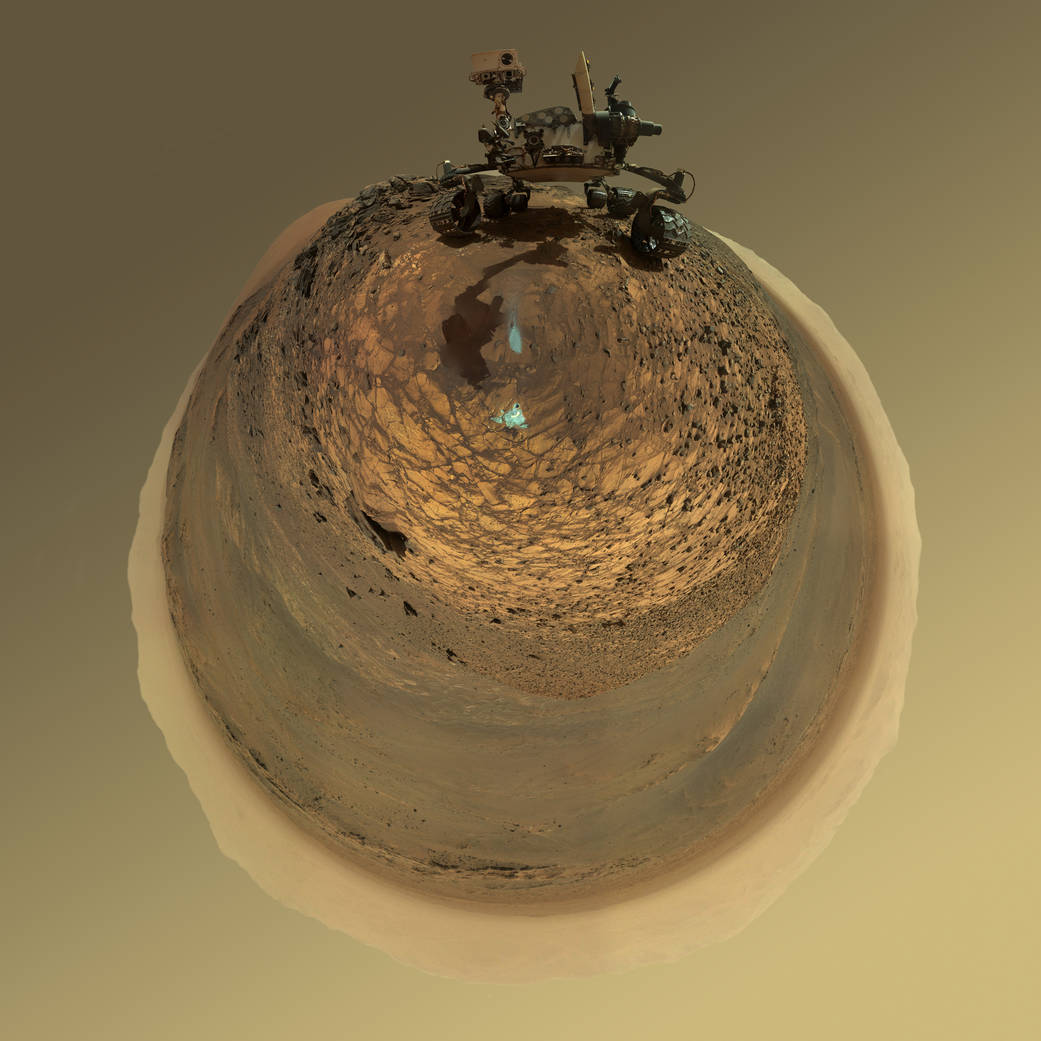
Round-Horizon Version of Curiosity’s Low-Angle Selfie at ‘Buckskin’
 3")
This version of a self-portrait of NASA’s Curiosity Mars rover at a drilling site called “Buckskin” on lower Mount Sharp is presented as a stereographic projection, which shows the horizon as a circle.
It is a mosaic assembled from the same set of 92 component raw images used for the flatter-horizon version. The component images were taken by Curiosity’s Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover’s work on Mars.
Curiosity drilled the hole at Buckskin during Sol 1060 (July 30, 2015). Two patches of pale, powdered rock material pulled from inside Buckskin are visible in this scene, in front of the rover. The patch closer to the rover is where the sample-handling mechanism on Curiosity’s robotic arm dumped collected material that did not pass through a sieve in the mechanism. Sieved sample material was delivered to laboratory instruments inside the rover. The patch farther in front of the rover, roughly triangular in shape, shows where fresh tailings spread downhill from the drilling process. The drilled hole, 0.63 inch (1.6 centimeters) in diameter, is at the upper point of the tailings.
[pullquote]The rover is facing northeast, looking out over the plains from the crest of a 20-foot (6-meter) hill that it climbed to reach the “Marias Pass” area.[/pullquote] The upper levels of Mount Sharp are visible behind the rover, while Gale Crater’s northern rim dominates most of the rest of the horizon.the horizon on the left and right of the mosaic.
MAHLI is mounted at the end of the rover’s robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity. The assembled mosaic does not include the rover’s arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. Shadows from the rest of the arm and the turret of tools at the end of the arm are visible on the ground. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic.
MAHLI was built by Malin Space Science Systems, San Diego. NASA’s Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project’s Curiosity rover.
Looking Up at Mars Rover Curiosity in ‘Buckskin’ Selfie
 4")
This low-angle self-portrait of NASA’s Curiosity Mars rover shows the vehicle at the site from which it reached down to drill into a rock target called “Buckskin” on lower Mount Sharp.
The selfie combines several component images taken by Curiosity’s Mars Hand Lens Imager (MAHLI) on Aug. 5, 2015, during the 1,065th Martian day, or sol, of the rover’s work on Mars. For scale, the rover’s wheels are 20 inches (50 centimeters) in diameter and about 16 inches (40 centimeters) wide.
A close look reveals a small rock stuck onto Curiosity’s left middle wheel (on the right in this head-on view). The rock had been seen previously during periodic monitoring of wheel condition about three weeks earlier, in the MAHLI.
MAHLI is mounted at the end of the rover’s robotic arm. For this self-portrait, the rover team positioned the camera lower in relation to the rover body than for any previous full self-portrait of Curiosity.
The selfie at Buckskin does not include the rover’s robotic arm beyond a portion of the upper arm held nearly vertical from the shoulder joint. With the wrist motions and turret rotations used in pointing the camera for the component images, the arm was positioned out of the shot in the frames or portions of frames used in this mosaic. This process was used previously in acquiring and assembling Curiosity self-portraits taken at sample-collection sites “Rocknest” “Windjana” and “Mojave”
MAHLI was built by Malin Space Science Systems, San Diego. NASA’s Jet Propulsion Laboratory, a division of the California Institute of Technology in Pasadena, manages the Mars Science Laboratory Project for the NASA Science Mission Directorate, Washington. JPL designed and built the project’s Curiosity rover.





